




本文经自动驾驶之心公众号授权转载,转载请联系出处。
本项目代码:
github.com/liangwq/robot_motion_planing
轨迹约束中的软硬约束
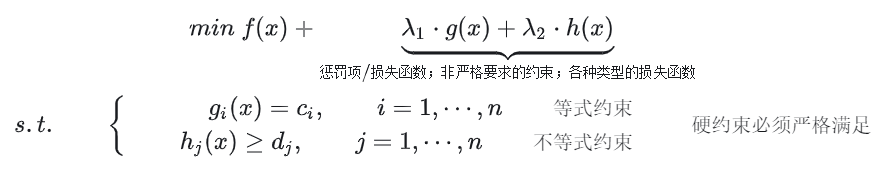
前面的几篇文章已经介绍了,轨迹约束的本质就是在做带约束的轨迹拟合。输入就是waypoint点list,约束条件有两种硬约束和软约束。所谓硬约束对应到数学形式就是代价函数,硬约束对应的就是最优化秋季的约束条件部分。对应到物理意义就是,为了获得机器人可行走的安全的轨迹有:
- 把轨迹通过代价函数推离障碍物的方式
- 给出障碍物之间的可行走凸包走廊,通过硬约束让机器人轨迹必须在凸包走廊行走
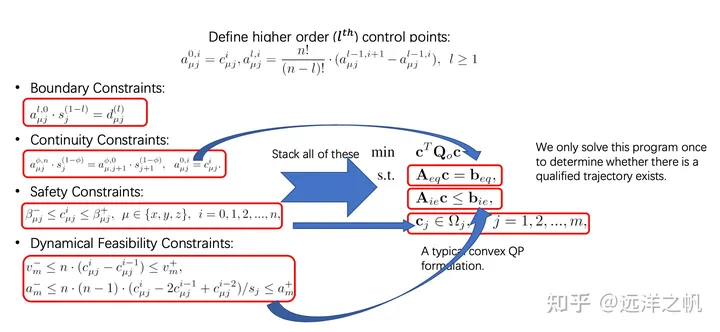
上图展示的是软硬约束下Bezier曲线拟合的求解的数学框架,以及如何把各种的约束条件转成数学求解的代价函数(软约束)或者是求解的约束条件(软约束)。image.png
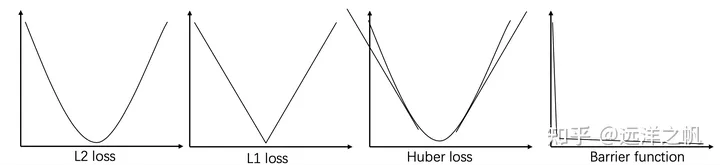
上面是对常用的代价函数约束的几种表示方式的举例。image.png
Bezier曲线拟合轨迹
前面已经一篇文章介绍过贝赛尔曲线拟合的各种优点:
- 端点插值。贝塞尔曲线始终从第一个控制点开始,结束于最后一个控制点,并且不会经过任何其他控制点。
- 凸包。贝塞尔曲线 ( ) 由一组控制点 完全限制在由所有这些控制点定义的凸包内。
- 速度曲线。贝塞尔曲线 ( ) 的导数曲线 ′( ) 被称为速度曲线,它也是一个由控制点定义的贝塞尔曲线,其中控制点为 ∙ ( +1− ),其中 是阶数。
- 固定时间间隔。贝塞尔曲线始终在 [0,1] 上定义。
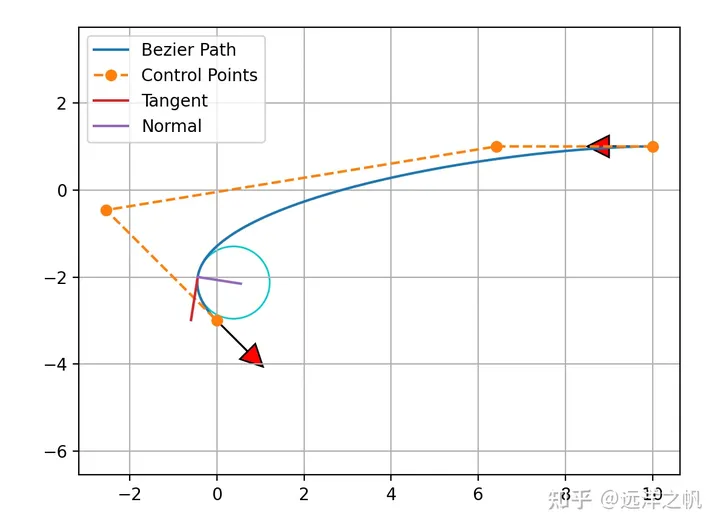
Fig1.一段轨迹用bezier曲线拟合image.png
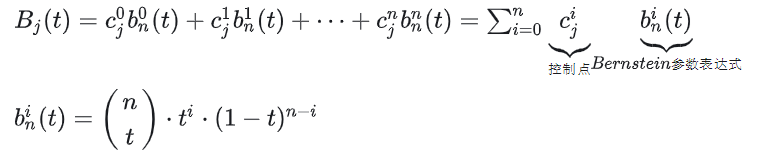
上面的两个表达式对应的代码实现如下:
def bernstein_poly(n, i, t):
"""
Bernstein polynom.
:param n: (int) polynom degree
:param i: (int)
:param t: (float)
:return: (float)
"""
return scipy.special.comb(n, i) * t ** i * (1 - t) ** (n - i)
def bezier(t, control_points):
"""
Return one point on the bezier curve.
:param t: (float) number in [0, 1]
:param control_points: (numpy array)
:return: (numpy array) Coordinates of the point
"""
n = len(control_points) - 1
return np.sum([bernstein_poly(n, i, t) * control_points[i] for i in range(n + 1)], axis=0)分享说明:转发分享请注明出处。


