




本文经自动驾驶之心公众号授权转载,转载请联系出处。
1.背景
仿真在自动驾驶的研发中起到重要作用,能大大提高研发效率,也为算法的可靠性提供保障。百度Apollo系统是优秀开源的平台,适合想学习自动驾驶的朋友研究。Carsim/Trucksim是经典的汽车动力学仿真工具。
今天给大家分享的是通过Apollo和Trucksim的联合,实现本地的实时仿真。本文档适合于初学者搭建仿真平台,研究Apollo系统。
2. 架构设计
Apollo工程核心代码是C++实现,Trucksim的常用接口有simulink, python和C。本文先给出Apollo, simulink和Trucksim联合仿真的架构以及本套仿真存在的弊病。再讲Apollo和Trucksim的联合仿真。
2.1 Apollo, simulink和Trucksim方案
simulink和Apollo可通过ros通信,由于Apollo的消息数据格式是protobuf,而simulink的ros工具只支持标准的ros msg,因此可在Apollo中添加一个格式转换的节点。simulink调用Trucksim的方案网上资源很多,本人不再赘述。
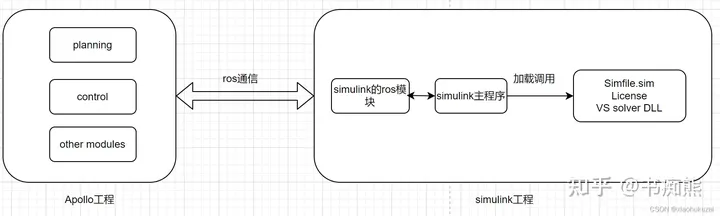
simulink方案图
2.2 Apollo,rosbridge和Trucksim方案
建立QT工程,和Apollo工程通过websocket通信. Apollo工程里增加rosbridge(Apollo 5.0后版本使用cyber_bridge), 实现ros消息(或cyber消息)和websocket的互转。QT工程发挥websocket Client作用。QT用C++实现,并调用Trucksim的动态库,达到实时运行Trucksim的作用。
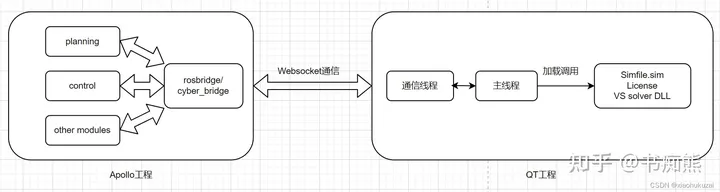
rosbridge方案图
3. 功能实现
3.1 Apollo, simulink和Trucksim方案
3.1.1 Simulink配置
Simulink的工具包中有ROS的支持包,配置ROS网络地址如图2所示。Hostname/IP Address和Port分别为ROS_MASTER_URI的地址和端口号,在上面的通信机制中有说明。
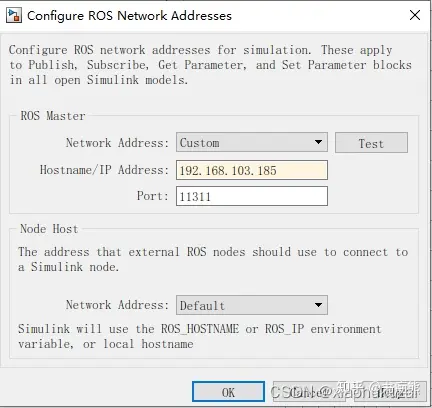
配置ROS网络地址
ROS subscriber接收interface的消息,因此Topic, Message type, Sample time要与interface中程序相对应。
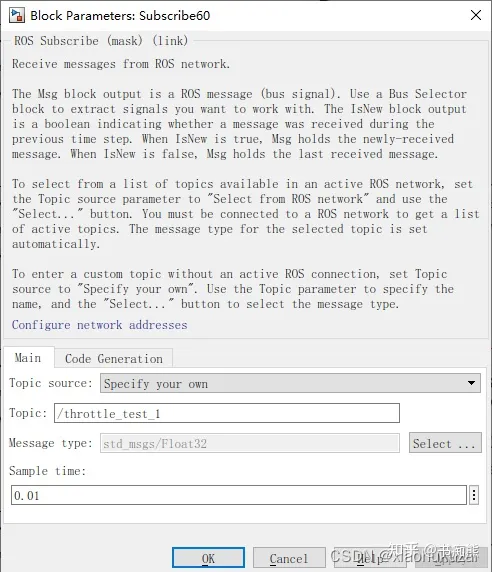
配置ros subcribe
为了便于调试验证,现在MATLAB端启动ROS。配置过程如下:
MATLAB设置的指令:
>> setenv('ROS_MASTER_URI','http://192.168.103.122:11311')
>> setenv('ROS_IP','192.168.103.198')
>> rosinit('192.168.103.122')分享说明:转发分享请注明出处。


