





【Optimal Control of Connected Automated Vehicles with Event-Triggered Control Barrier Functions: a Test Bed for Safe Optimal Merging 】
文章链接:https://arxiv.org/abs/2306.01871
摘要
本研究旨在探讨智能网联汽车(Connected and Automated Vehicles,CAVs)在冲突区域,特别是匝道并线处,如何通过控制障碍函数(Control Barrier Functions,CBFs)以事件触发的方式来确保安全约束。当前解决方案中频繁的二次规划(Quadratic Programs,QPs)计算导致实际应用中的计算量巨大且同步通信困难。为应对这一挑战,我们提出了一种基于事件触发的控制框架,该框架通过在离散时间状态预设边界时触发下一次QP,以显著减少计算量并在噪声环境下保证系统的安全性。
引言
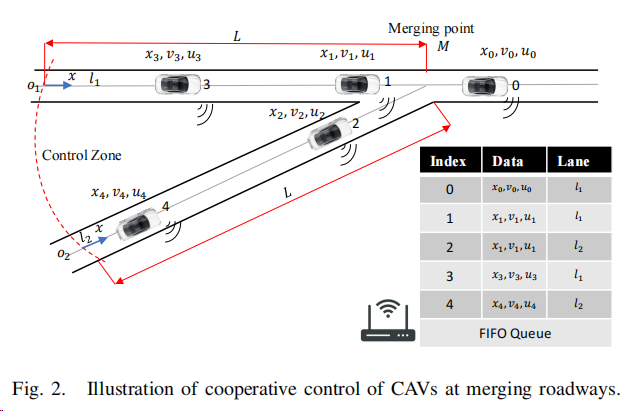
随着智能网联汽车技术的不断发展,CAVs在复杂交通环境中的行驶安全成为研究的重要方向。本研究聚焦于冲突区域,特别是匝道并线场景,其中CAVs需要高效的优化控制以确保安全约束。目前,频繁的QP解算成为制约实际应用的主要难题,因此论文提出了一种基于事件触发的控制框架,力求在降低计算负担的同时保持系统的稳健性。
方法
论文提出基于事件触发控制框架,通过离散时间预设边界时的事件,触发下一次QP计算,从而降低计算复杂度。具体而言,采用CBFs作为安全约束,并通过事件触发的方式来实现对CBFs的控制。这一框架的优势在于在保证系统安全性的同时显著减少了QP的解算次数,从而提高了实际应用的效率。
实验设计
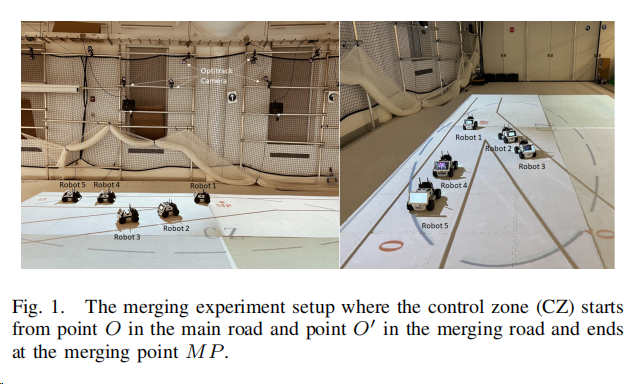
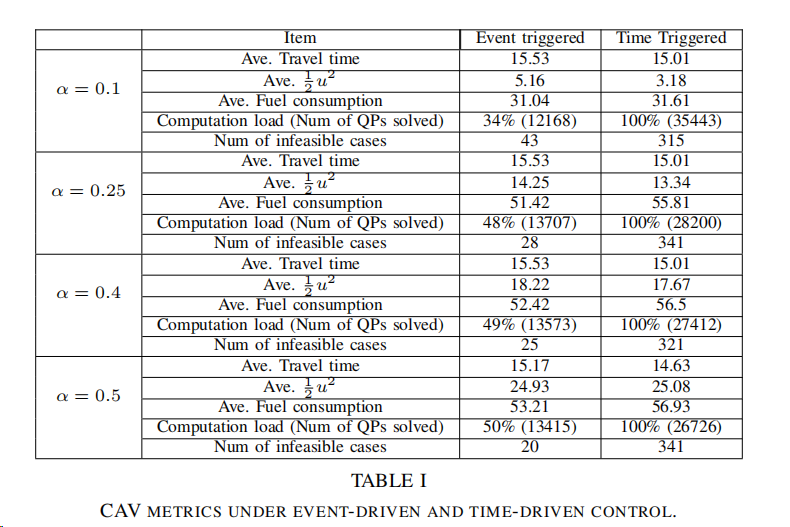
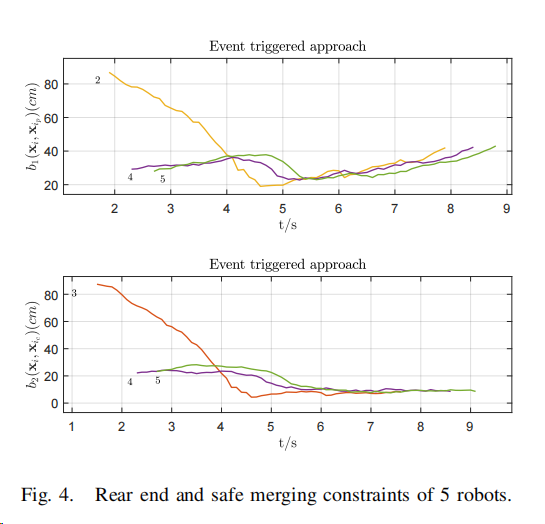
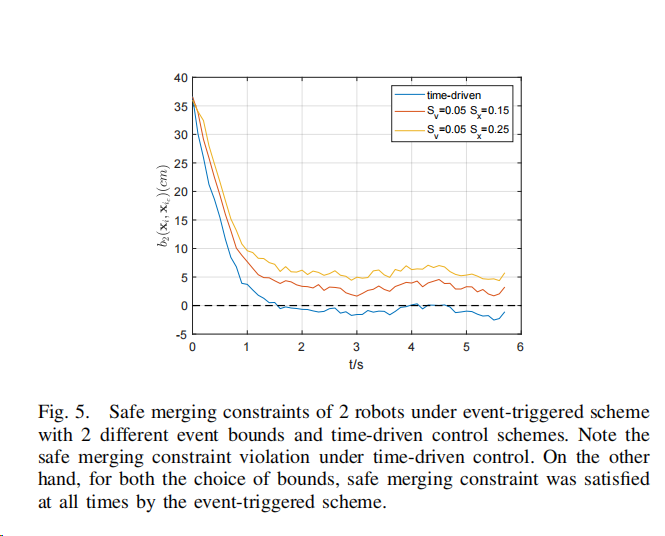
在仿真和实验平台上验证了提出的事件触发控制框架。使用松灵LIMO多模态机器人进行CAV模拟,并对比了事件触发控制与传统时间驱动方式在QP计算、不可行情况降低以及噪声环境下的性能差异。实验结果表明,事件触发控制相较于时间驱动方式,能够显著减少QP计算次数,并在实际噪声环境下保持对安全约束的有效控制。

分享说明:转发分享请注明出处。



