




科技云
■本期观察:宋美洋 李欣衍 梁子旭
仿生穿山甲机器人
近日,德国斯图加特马克斯·普朗克智能系统研究所科研人员,制作了一款能在人体内部“导航”的微型机器人。相关成果已发表在《自然·通讯》杂志。
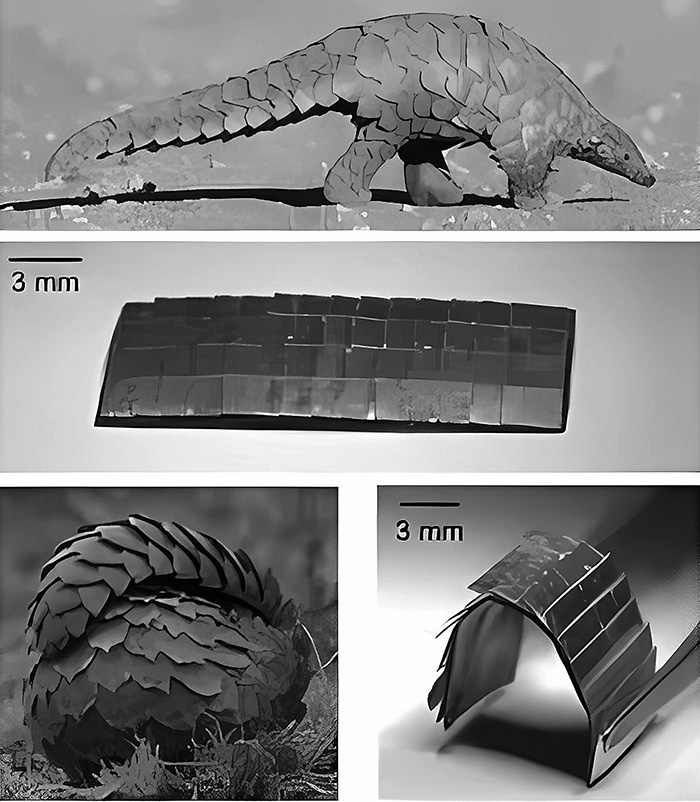
穿山甲能够利用其层层互锁的角蛋白鳞片在复杂环境中流畅地移动,必要时可以将自己卷曲成球。受此启发,科研人员开发出了一款酷似穿山甲的微型机器人。该机器人采用复合结构,里层为软质聚合物层,上面镶嵌着磁性颗粒;外层为硬质顶层,用铝制成它的“硬质鳞片”。在低频磁场环境中,研究人员可以控制它移动和滚动。卷起时,该机器人可以将药物等颗粒输送到体内的目标部位。在高频磁场环境中,它可以加热到70℃以上,用以治疗内出血、血栓,或者清除肿瘤组织。
实验测试中,这款机器人可以在不损坏软组织的情况下移动,覆盖出血处并加热来实现止血功能。研究人员相信,这款机器人未来将在棘手的人体内部治疗和手术上发挥重要作用。
仿生蜜蜂机器人
前不久,《IEEE机器人学报》刊文称,美国华盛顿州立大学研究团队设计了一种可以在各个方向稳定飞行的仿生蜜蜂机器人。
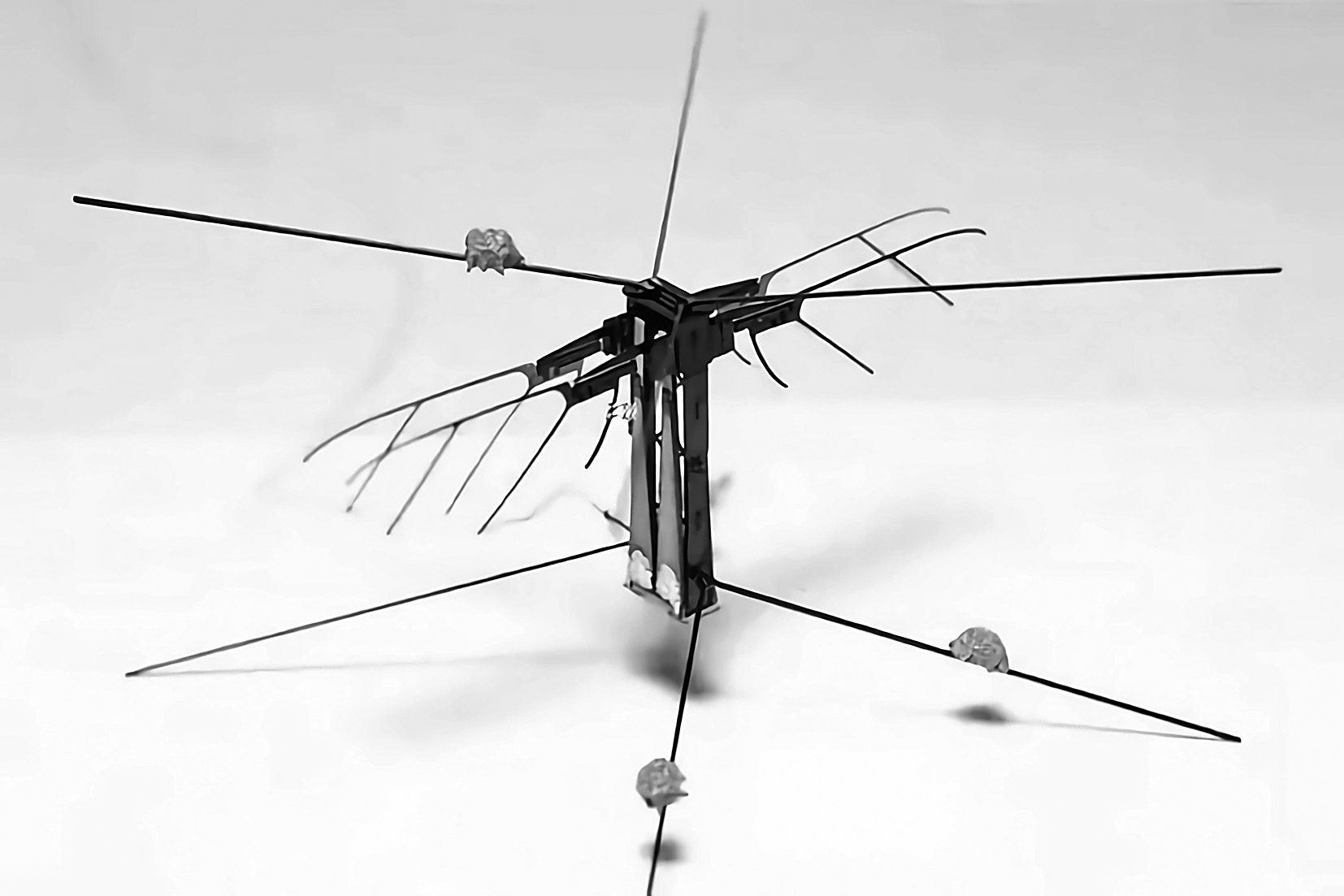
对于可以飞行的昆虫机器人来说,在飞行中控制它们的偏航轴是个巨大的挑战。研究人员受到蜜蜂飞行方式启发,通过独立地改变每个翅膀的拍打速度实现了控制偏航轴的目的。这使得该机器人在飞行中能够灵活地“做扭转”。该机器人有4个由碳纤维和胶布制成的翅膀,每个翅膀都由一个单独的执行装置控制,由此解决了4个翅膀以相同的速度拍打时力和扭矩抵消的问题。相比于一般扑翼微型飞行器只能朝向一个方向飞行,该机器人通过4个翅膀的协同配合实现了俯仰、横滚和偏航等运动方式,更具运动灵活性。
据称,该机器人能在狭小空间内执行搜救侦察、环境监测等任务,同时还可应用于农作物的人工授粉等领域。
仿生蜈蚣机器人
近期,日本大阪大学的研究人员开发出了一款仿生蜈蚣机器人,相关成果发表于《软体机器人》杂志。
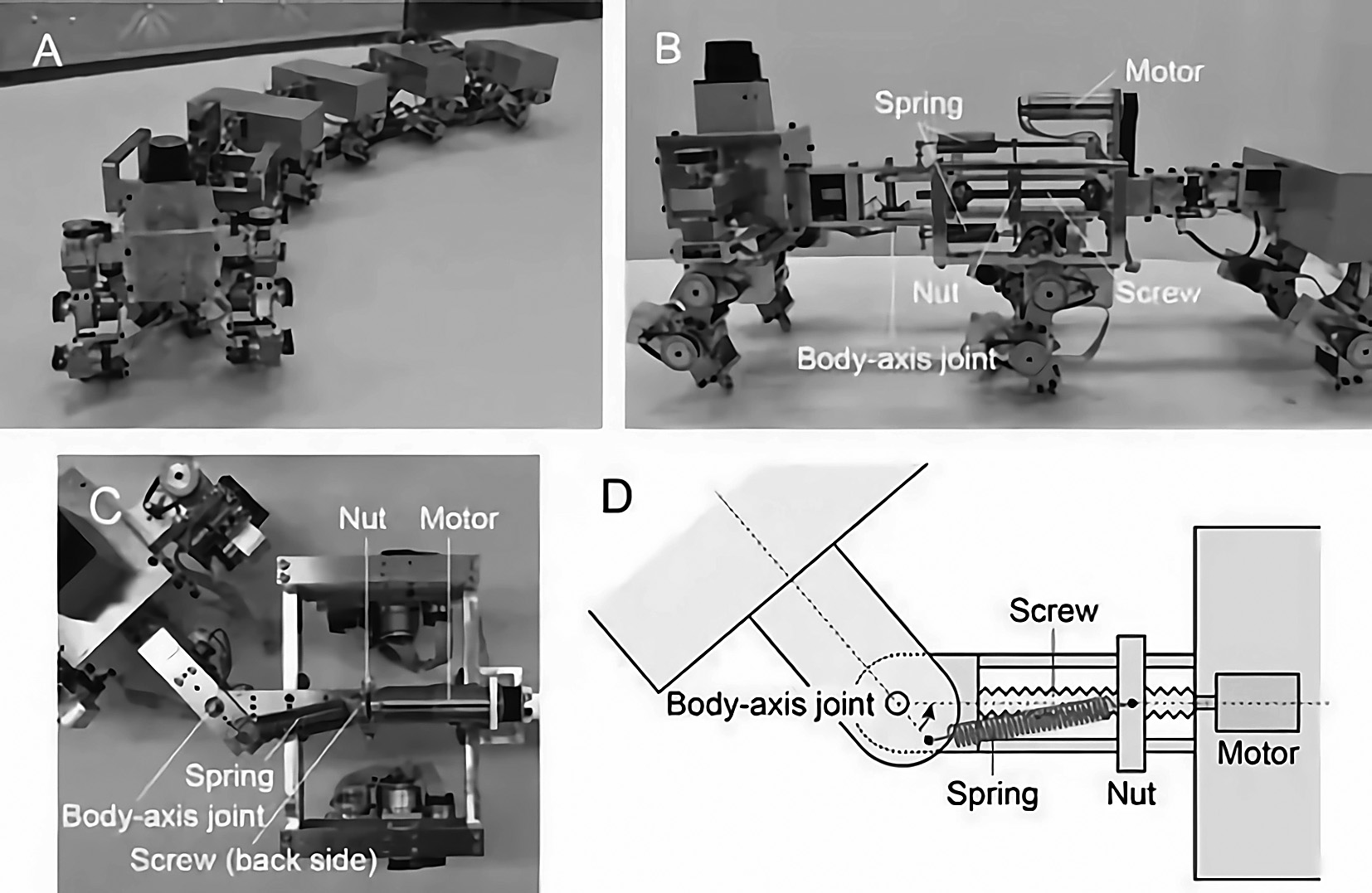
研究人员受到蜈蚣爬行方式的启发,根据蜈蚣多腿且能依据环境调整自己形状的特性设计了这款机器人。该机器人由6个部分组成,每个部分包含两条腿,通过灵活的关节连接,可以实现偏航或朝不同方向移动。研究人员通过控制其身体轴的灵活性,使其以一种弯曲的模式行走。这种运动方式不仅提供了更强的稳定性和可操作性,还大大降低了计算的复杂性和操作机器人所需的能量要求,其越野能力也进一步得到提高。
据研究人员介绍,该机器人可用于搜索和救援任务,未来或将应用于在危险环境中工作或科研探索。



